
9月18日,第25届IEEE智能交通系统国际会议(IEEE International Conference on Intelligent Transportation Systems,简称IEEE ITSC 2022)在中国北京开幕。
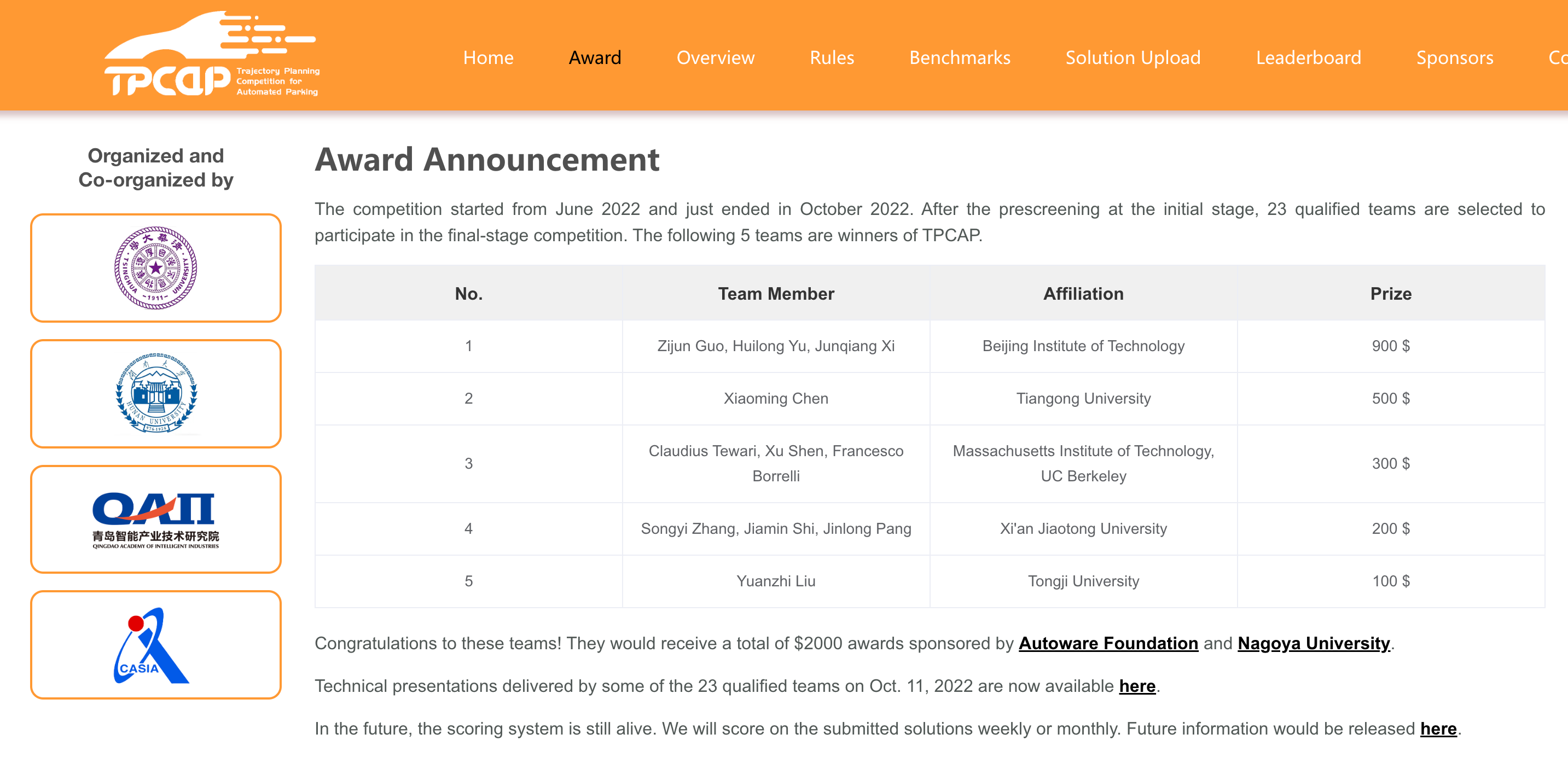
大会设立自主泊车轨迹规划全球挑战赛(Trajectory Planning Competition for Automated Parking,TPCAP)。北京理工大学机械与车辆学院汽车研究所郭子隽博士、于会龙教授、席军强教授团队获得挑战赛第一名。
会议简介

IEEE ITSC 是智能交通领域最高水平的顶级会议,由IEEE ITS协会每年举办一次,从1997年到2021年,已举办24届,足迹遍布亚洲、欧洲、北美洲、南美洲、大洋洲12个国家24个城市。会议集多学科、多技术之大成,涉及人工智能、交通、电子、通信、控制和计算机等专业,且集中反映了当前关注的核心问题及未来的发展方向,代表了国际智能交通领域的最高水平和最新进展,是智能交通领域重要的科学盛会。
赛事介绍

TPCAP是一项聚焦于泊车场景自动驾驶车辆轨迹规划技术的全球线上比赛。该赛事依托第25届IEEE智能交通系统国际会议(IEEE ITSC 2022)举办,由湖南大学、青岛智能产业技术研究院、中国科学院自动化所、清华大学等单位组织承办。赛事为业界与学术界研究人员提供比拼和切磋的机会,促进自主泊车轨迹规划技术的发展,引领高质量车载决策规划系统开发的技术潮流。
TPCAP自2022年6月上线以来,在全球范围内累计吸引了来自24家高校、研究机构、企业的61支参赛队伍,参赛单位包括麻省理工大学、加利福尼亚大学(伯克利分校)、路易斯安那州立大学、清华大学、北京理工大学、上海交通大学、浙江大学、复旦大学等国内外知名高校,以及上海浦江国家实验室、滴滴出行等具有高水平研究能力的科研院所/企业。
团队成果
参加TPCAP决赛的队伍从初赛成绩较好的队伍中选出:在3个月内成功得到全部20道赛题可行解的23支队伍(来自国内外16个单位)被邀请参加决赛。决赛题目于2022年10月10日公布,比赛时间限定为24小时,且各参赛队只有一次提交结果的机会。由于时间受限且不存在试错机会,决赛较之初赛更具挑战性与悬念。最终,经过组委会打分系统的评价,北京理工大学代表队夺得了挑战赛冠军。
据了解,该团队长期致力于研究复杂环境下无人驾驶预测、决策、规划与控制理论及技术,在无人驾驶智能决策、最优控制等领域有着扎实的研究基础;在本次挑战赛中,该团队设计了从粗搜索到精细优化的自主泊车轨迹规划算法流程(具体包括多分枝混合A*搜索算法、避碰约束可视性筛选与分配算法、基于配点法和约束迭代收紧的非线性优化算法),在初赛与决赛中有效解决了若干困难赛题。
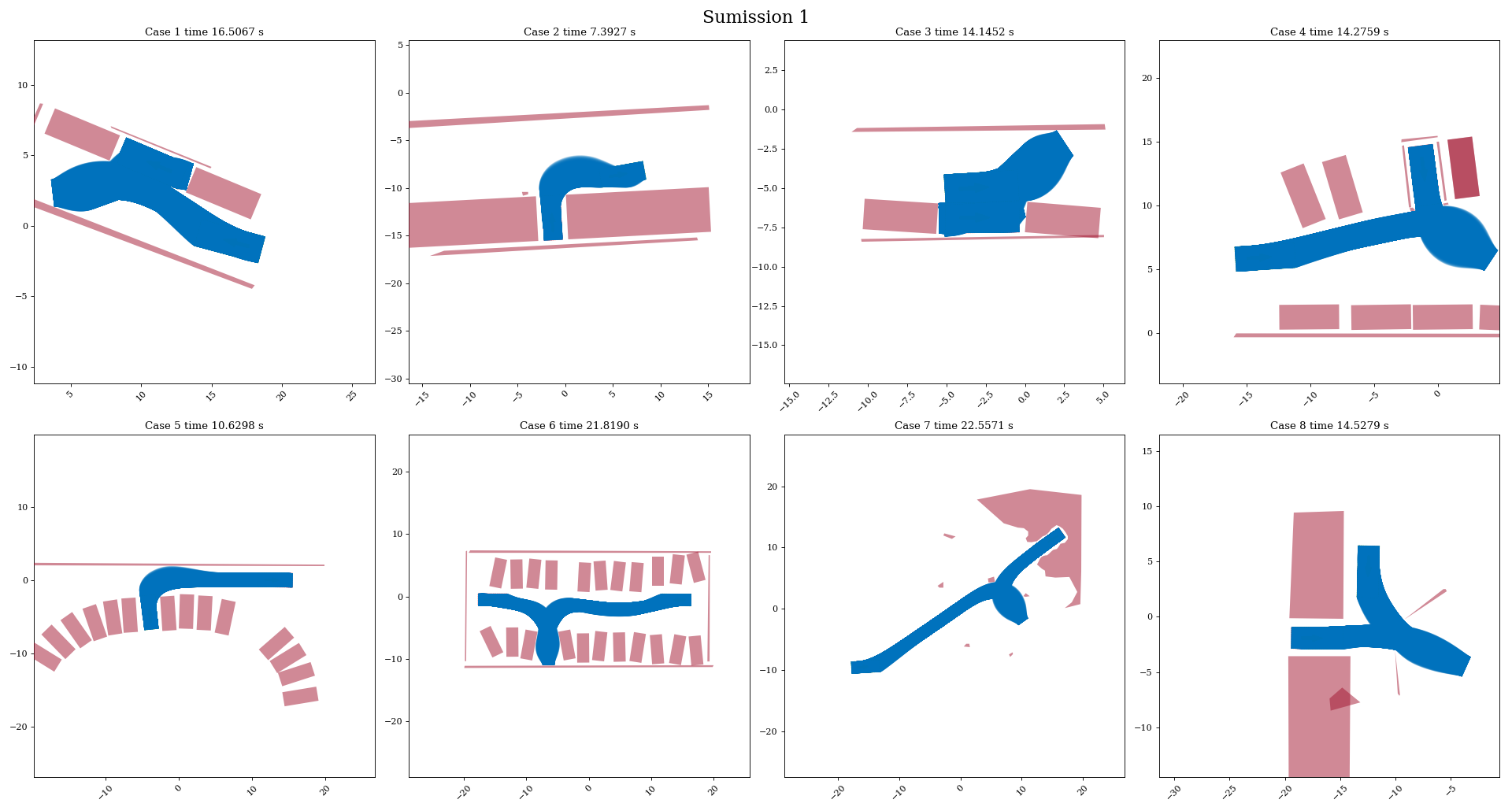
团队在决赛提交的泊车轨迹
2022年10月11日晚10时,TPCAP组委会组织了线上颁奖典礼以及技术研讨会。在研讨会中,包括北京理工大学代表队在内的12支决赛队伍自愿进行了技术分享。

线上研讨会录播视频传送门